广汽集团近期在自动驾驶技术方面取得了新的突破,其申请的“自动驾驶变道控制综合方案”专利信息已被企查查APP公开。这项专利详细介绍了一种在自动驾驶车辆执行变道过程中,如何高效处理变道取消指令的方法。
具体来说,当自动驾驶车辆在变道过程中接收到取消指令时,该方案会立即获取车辆当前的位置信息。随后,系统会基于这些信息判断变道取消的紧急程度,即所谓的“变道取消等级”。根据这一等级,系统会进一步确定车辆应达到的目标状态和理想的位置姿态(位姿)。
在确定了目标状态和目标位姿后,车辆的决策状态机会迅速跳转至相应的目标状态,从而实现对车辆控制的即时调整,确保车辆能够平稳、安全地达到预定的位置姿态。这一整个过程不仅提升了自动驾驶车辆在变道过程中的灵活性,还显著增强了其安全性和乘客的舒适度。
广汽集团的这项专利不仅仅是一种方法,它还涵盖了实现这一功能的完整系统、专用装置、存储介质以及具体车辆的设计方案。这一综合方案的实施,标志着广汽集团在自动驾驶技术的研发和应用上迈出了重要的一步。
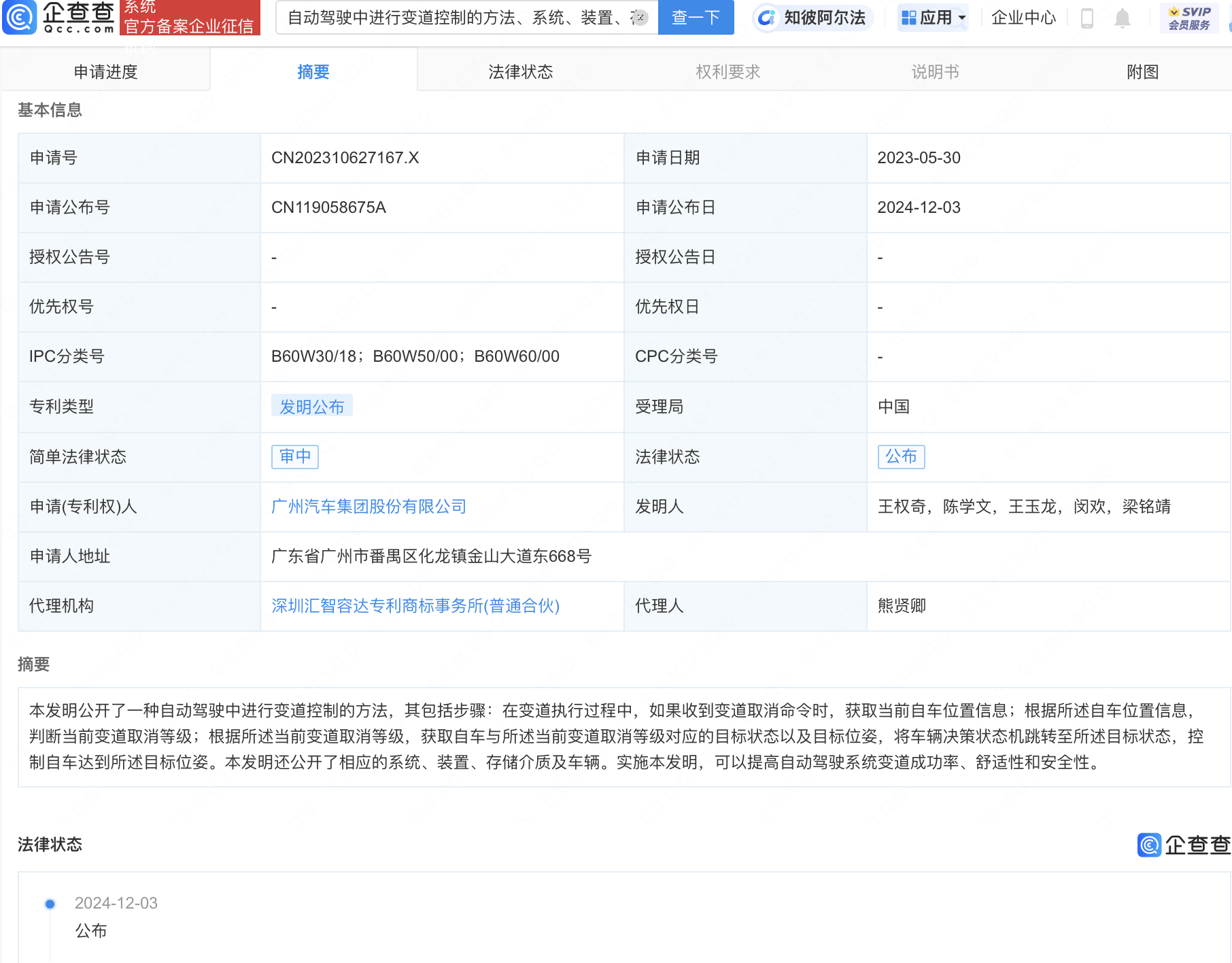
业内专家表示,广汽集团的这一创新成果,不仅有助于提升自动驾驶系统的变道成功率,还能够在很大程度上改善驾驶体验,让自动驾驶更加贴近用户的实际需求。未来,随着这一技术的不断成熟和应用,我们有理由相信,自动驾驶车辆将变得更加智能、安全和可靠。