人形机器人的技术进步再次迎来了新的突破。近日,逐际动力公司展示了其最新研发的全尺寸人形机器人,这款机器人在稳定性和灵活性方面均实现了显著提升。
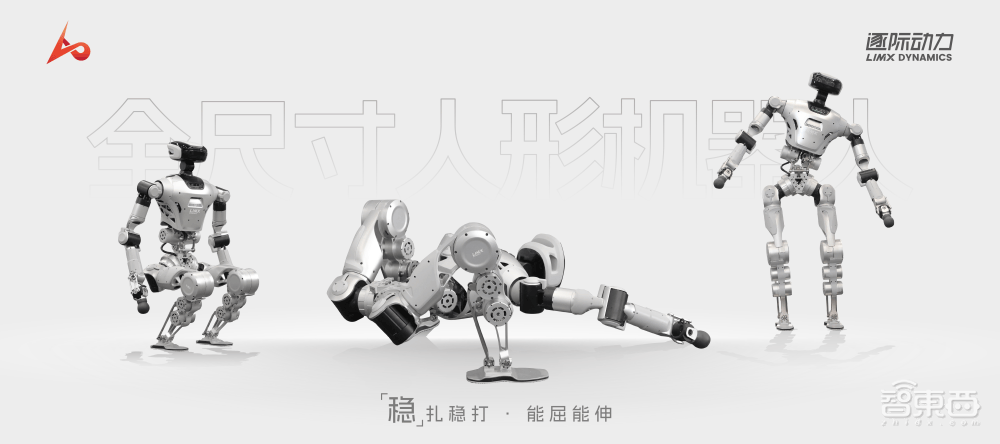
几个月前,逐际动力的一款人形机器人在日本机器人大会上展现了出色的稳定性和平衡性,即便面对观众的“围殴”也能保持稳健。而现在,他们推出的新一代机器人更是令人瞩目。在最新的测试视频中,这款机器人展示了全身多关节协同大范围运动的能力,完成了一系列复杂且稳定的动作。
为了实现这一突破,逐际动力对机器人进行了全面的工程化升级。他们采用了中空关节设计,优化了动力缆线和通信线缆的排布,这不仅提升了机器人的稳定性,还赋予了机器人更大的关节活动范围。同时,高力矩密度关节的应用,使得机器人能够输出强大的扭矩,并实现了高性能的关节控制。

在演示中,这款机器人展示了其出色的灵活性和稳定性。它能够完成“亚洲蹲”、反复深蹲、扭腰、原地起身等一系列复杂动作,每一个动作都显得流畅而稳定。特别是当机器人腿部实现高度拟人化的大角度屈曲-伸展时,结合腰部及颈部的俯仰运动,机器人能够完成全身重心的动态平稳下落,最后仰面躺下,这一连串的动作令人赞叹不已。
高力矩密度关节还为机器人提供了更强劲的动力,使得下肢关节的活动范围更大。在演示中,机器人能够反复进行大幅度的蹲起动作,完美复刻了“帕梅拉”深蹲,并始终保持全身姿态的平衡。这一表现不仅展示了机器人强大的运动能力,也体现了逐际动力在运动控制算法方面的深厚功底。
机器人的腰部同样令人印象深刻。它能够大范围全向旋转,并且在旋转过程中始终保持全身的稳定。这一特性使得机器人在进行复杂动作时更加自如,也为其在各种应用场景中的表现提供了更多的可能性。

这款机器人还拥有超过360°旋转的胯关节,可以连续旋转。髋、膝盖、脚踝等关节的协同作用,使得机器人在原地起身后能够保持稳定站立姿态,并能够在全身协调下进行前后移动。这一表现不仅展示了机器人在运动控制方面的卓越能力,也为其在未来的应用提供了更多的想象空间。