智能驾驶领域近期迎来了一场技术革命,随着多家车企发布新车型与技术升级,这一话题再次成为了公众热议的焦点。在这场技术竞赛中,理想汽车凭借其OTA7.0版本的全量推送,正式宣告其OneModel端到端+VLM智驾系统实现了“全场景端到端”的能力,引领了智能驾驶的新风潮。
在智能驾驶技术的迭代过程中,实用性与用户体验始终是核心考量。理想汽车此次推出的OTA7.0版本,不仅标志着其在智能驾驶技术上的重大突破,更通过行业首创的AI推理可视化能力,让用户首次能够直观看到AI在驾驶过程中的思考与执行过程,极大地增强了用户的信任感与安全感。理想也因此成为了国内唯一、全球第二家将端到端技术应用于城市、高速及环路NOA场景的车企。
理想OneModel端到端智驾系统的强大之处在于其广泛的覆盖能力和高度的拟人化驾驶风格。该系统支持全国新开通的高速、长隧道以及城市与高速之间的切换点等复杂道路行驶,能够在大部分路段实现无降级、不断点的智能驾驶通行。在实际测试中,一辆理想L7 Ultra车型展现了这一系统在面对复杂路况时的出色表现,无论是匝道等大曲率弯道,还是前方慢车变道、大货车避让等场景,都处理得游刃有余。


AI推理可视化功能更是将智能驾驶的透明度提升到了新的高度。该界面分为三个区域:E2E(端到端模型)展示车辆、道路、轨迹线预测等信息;Attention(注意力系统)以热力图形式展示系统对实时路况的评估;VLM(视觉语言模型)则负责解释车载摄像头捕捉到的交通情况,并做出合理的推理决策。这样的配置不仅提升了智能驾驶的安全性,也让用户能够更直观地理解AI的决策过程。
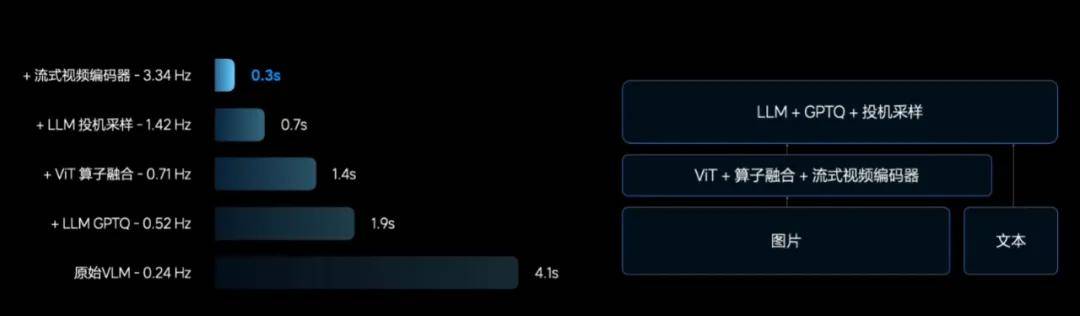
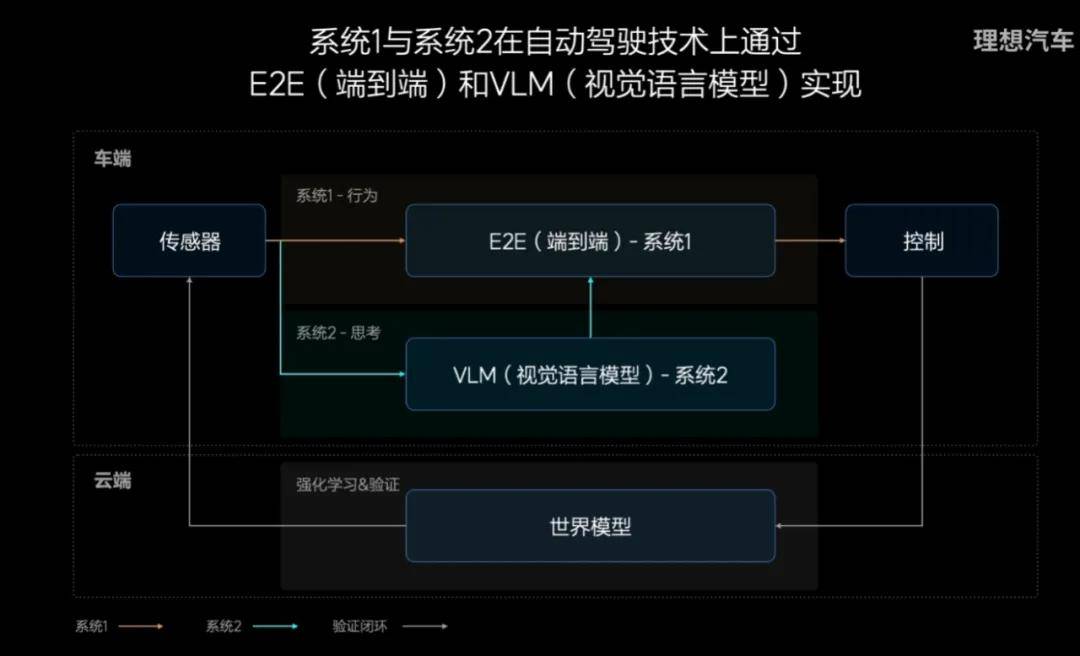
理想汽车表示,其端到端智能驾驶系统之所以能够实现如此出色的表现,离不开大模型革命的影响。自2022年底生成式AI兴起以来,越来越多的行业开始引入大模型技术。在自动驾驶领域,端到端智能驾驶成为了新兴的研究方向。理想通过双系统架构——系统1(端到端模型)实现高效、拟人化的驾驶体验,系统2(VLM视觉语言模型)处理复杂场景——成功实现了智能驾驶技术的代际跨越。
与特斯拉等先行者相比,理想汽车的端到端智能驾驶系统同样展现出了强大的竞争力。该系统不仅保留了激光雷达的数据输入以确保安全性下限,还通过一体化的AI模型实现了从家中车位到目的地车位的全程智能驾驶。在北京城区内的实际测试中,理想L7 Ultra车型展现出了与以往智能驾驶截然不同的体验:工作区域覆盖面更广、驾驶更聪明、在复杂路况下的操作更稳定。

理想汽车的这一技术突破,不仅是对智能驾驶技术的革新,更是对公司未来发展方向的深刻洞察。理想创始人李想曾表示,电动化是上半场,智能化是下半场,理想汽车未来将持续发力AI,最终通过汽车载体实现AGI(通用人工智能)。这一愿景不仅体现了理想对智能驾驶技术的坚定信念,也展现了其在人工智能领域的雄心壮志。
随着智能驾驶技术的不断发展,理想汽车正以其端到端智能驾驶系统和AI推理可视化功能为引领,推动整个行业向更加智能、安全、高效的方向迈进。未来,理想汽车将继续坚持核心技术自研,不断探索智能驾驶的新边界,为用户带来更加优质的出行体验。