在机器人技术的前沿探索中,一个名为AgiBot World的项目正引发广泛关注。该项目旨在构建一个基于全域真实场景、全能硬件平台及全程质量把控的百万真机数据集,为机器人领域的发展注入新的活力。
AgiBot World项目由香港大学助理教授李弘扬博士团队与上海智元机器人合作推出,其目标是打造硬件与系统的AI融合模式。李弘扬博士在计算机视觉和深度学习领域有着深厚的研究背景,他曾在多个国际顶尖会议与期刊上发表论文,并在自动驾驶算法方面取得了显著成就,其中端到端自动驾驶算法UniAD更是被评为CVPR 2023最佳论文。
从自动驾驶到机器人领域,李弘扬博士的研究重心逐渐转移。他指出,自动驾驶和机器人之间存在许多共通之处,如感知、预测和规控等技能栈,以及与环境交互的能力。他特别关注端到端训练范式在机器人任务中的适用性,并致力于探索如何在这一领域复制自动驾驶的成功经验。
AgiBot World数据集的发布,标志着李弘扬团队在具身智能领域迈出了重要一步。该项目不仅物理形态统一,区别于简单堆砌不同子数据集的超大规模数据集,还在灵巧手操作、视触觉多模态信号和多机协同等方面展现出明显优势。这些特点使得AgiBot World在推动具身智能真正智能化和验证Scaling Law方面具有重要意义。

在AgiBot World数据集发布前,团队成员们通宵达旦进行准备,最终成功发布了这一重要成果。该数据集的发布也受到了央视总台和上海市经信委的报道,彰显了其在机器人领域的重要地位。
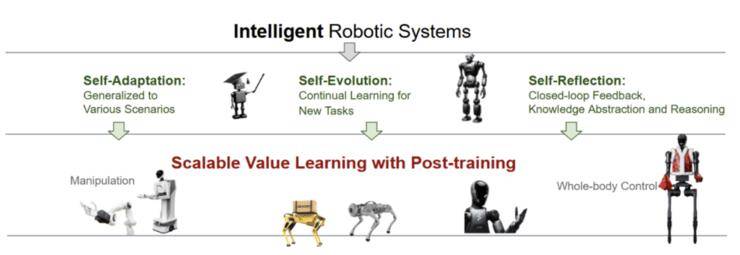
李弘扬博士表示,AgiBot World项目的愿景是通过数据共享,让整个产业和学界共同研究有价值的学术问题,实现具身智能领域的“ImageNet时刻”。他强调,实现具有人工智能的具身智能系统需要模型具备自适应、能学习和会反思三种能力。为此,团队正在探索如何构建真正具有智能的具身系统,使机器人能够适应各种环境、学习各种新任务,并从自身行动中获得反馈并进行反思。
在具身智能方向的研究中,李弘扬团队特别关注泛化能力、智能性和高效性三个核心问题。他们通过视觉预训练提升机器人操纵能力,并致力于解决机器人在面对不同场景和任务时的适应性和通用性问题。同时,他们也在探索如何使机器人具备闭环反馈能力,以及如何在保证性能的同时实现高效、轻量化的部署。
从自动驾驶到机器人领域,李弘扬团队面临着诸多挑战。他们发现,单纯将全局优化的理念直接迁移至机器人领域需要对网络结构和训练范式进行较大改进。数据采集难度也明显增加。为此,他们提出了数据金字塔策略,结合仿真数据、网络数据、真机数据以及针对特定任务的少量真机特殊场景,以期有效地解决数据问题。
AgiBot World项目的成功发布,为具身智能领域的发展注入了新的动力。李弘扬团队表示,他们将继续致力于探索全局优化与海量数据在机器人领域的应用潜力,并计划在未来推出全量数据集,并在CVPR、IROS等场合举办挑战赛。通过这些努力,他们期望能够推动整个产业和学界在具身智能领域取得更多突破性进展。