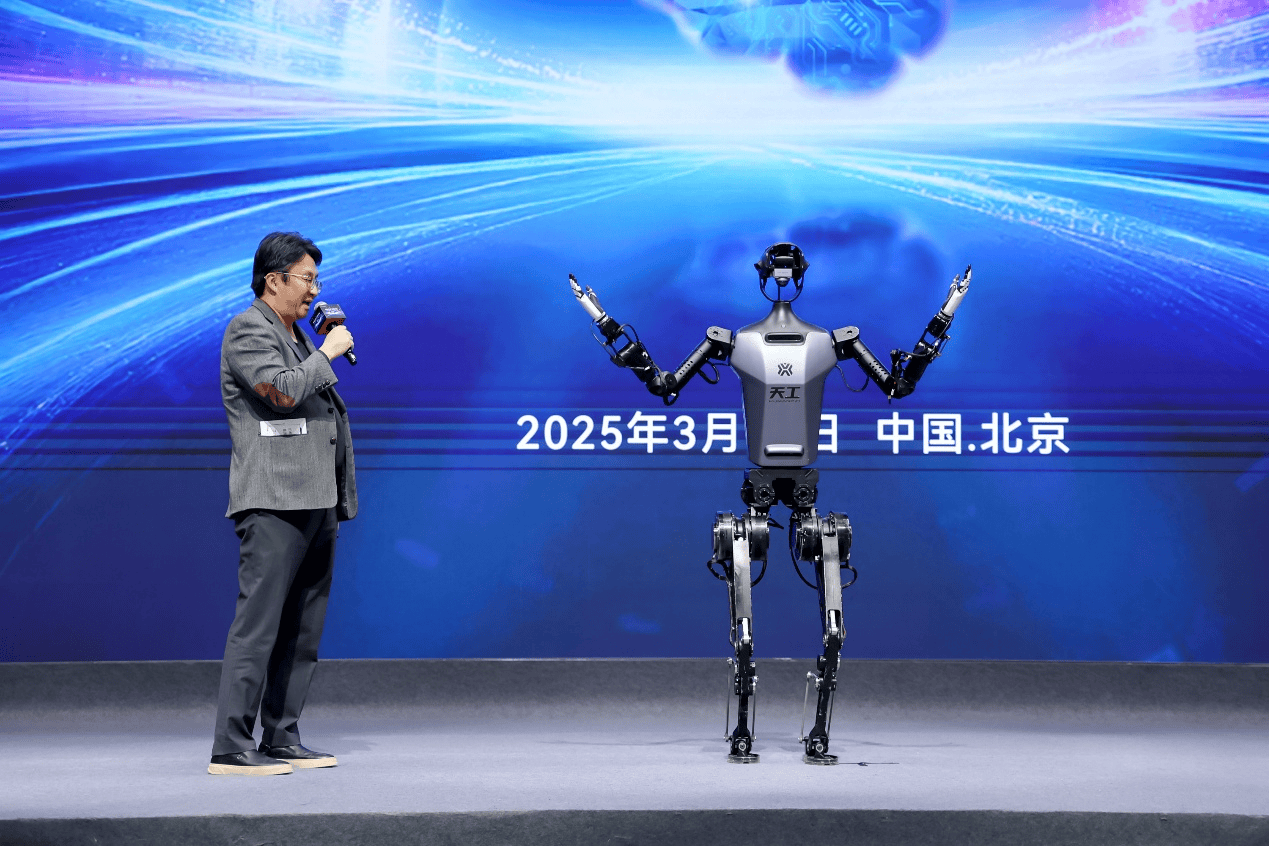
人形机器人技术迈出了关键一步,向实际应用场景又靠近了一大截。近日,北京人形机器人创新中心正式揭晓了其研发的全球首个“一脑多能”、“一脑多机”通用具身智能平台——“慧思开物”。这一平台的推出,旨在大幅度降低人形机器人开发难度,并使得不同形态的机器人都能共享一套核心技能。
“慧思开物”的核心在于其独特的架构,它融合了AI大模型与元技能库,构建了一个由“大脑”与“小脑”协同工作的系统。“大脑”负责任务规划,具备自然交互、空间感知、意图理解等高级功能,而“小脑”则专注于具体技能的执行,包括泛化抓取、双臂协作等。
“当前具身智能的发展仍处于初级阶段,急需一个能够兼容多种机器人本体、适应多种场景,并拥有强大泛化能力的通用平台。”创新中心总经理熊友军表示,“慧思开物”正是为了填补这一空白而诞生的。
“慧思开物”平台中的“大脑”能够解析复杂的自然语言指令,将其分解为可执行的任务序列,并在执行过程中实时监测和调整,确保任务顺利完成。而“小脑”则通过高效的端侧运动控制,实现了机器人动作的平滑与精准。创新中心CTO唐剑透露,目前“慧思开物”的技能库已包含超过30种技能,覆盖了大部分任务类型。
在数据训练方面,“慧思开物”采用了虚实结合的方式,即在虚拟环境中进行泛化和随机化训练,然后在真实环境中进行微调。唐剑指出,这种方式能够充分利用虚拟环境的多样性,同时保证机器人在真实环境中的表现。创新中心的数据显示,当虚拟数据与真实数据的比例为400:100时,机器人的执行成功率接近完美。
为了展示“慧思开物”的实际应用能力,创新中心在多个场景中进行了真机演示。在工业分拣场景中,UR-5e机械臂通过“慧思开物”APP接收语音指令,双臂协同完成了复杂的分拣任务,展示了平台在工业自动化领域的潜力。在积木搭建任务中,“天工”机器人利用视觉大模型对随机搭建的积木样例进行拆解,并精确完成了3层积木的毫米级搭建。
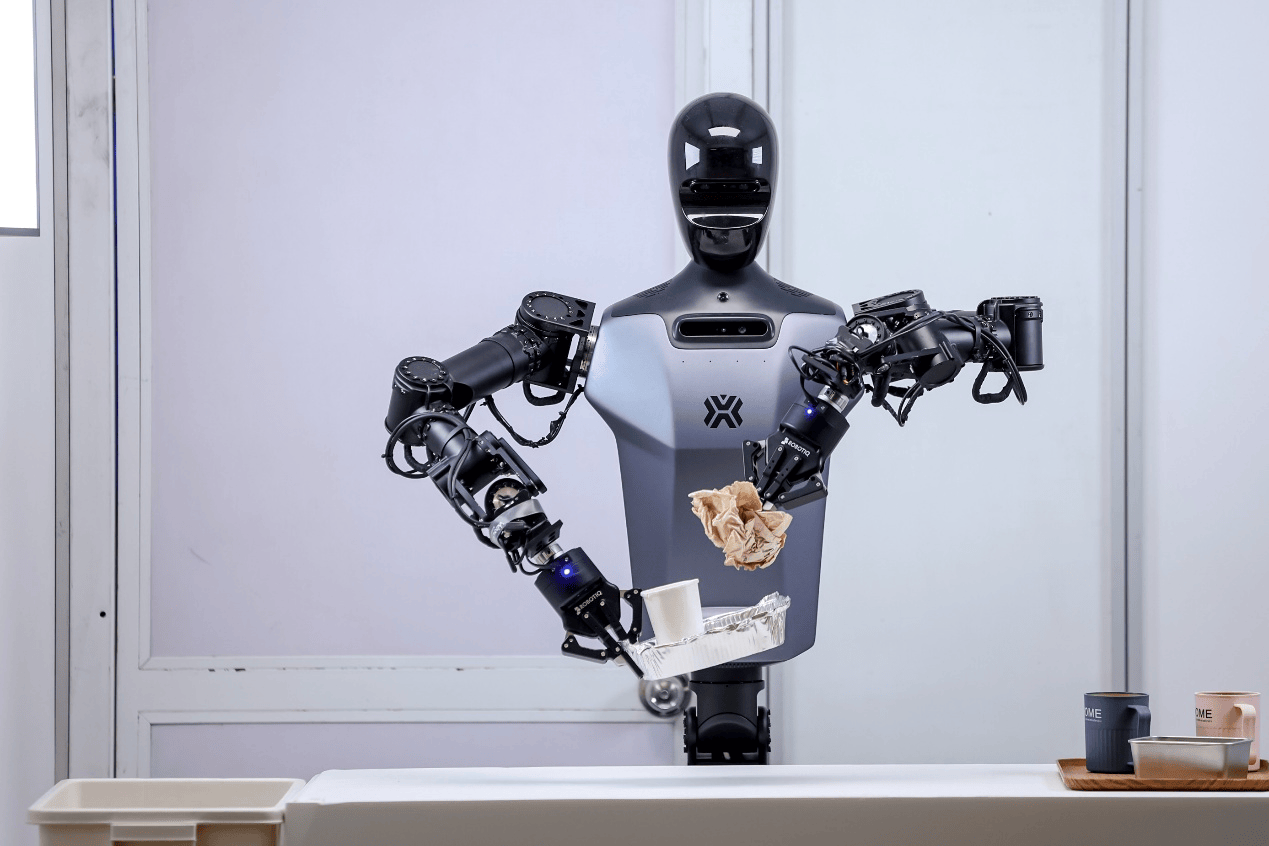
在桌面清理场景中,“天工”展示了其双臂协作的高效性和动态环境下的自适应能力。即使在人为干扰的情况下,机器人也能自主纠错并完成任务。而在物流打包场景中,“天工PRO”则首次实现了全尺寸人形机器人在物流打包全流程中的自主作业,从扫码、装箱到封箱、粘贴标签,一系列操作行云流水。

“慧思开物”还支持自定义模型和技能的快速添加,能够灵活适应不同场景的需求。唐剑表示,创新中心目前正积极探索将这一平台应用于教育科研、健康养老、特种作业以及工业制造等多个领域。
随着“慧思开物”平台的推出,人形机器人技术向实际应用场景迈出了坚实的一步。未来,我们有理由期待这些机器人将在更多领域发挥重要作用,为人们的生活带来更多便利。