随着AI大模型的蓬勃发展,诸如DeepSeek等前沿技术正逐步将人工智能的便捷带入公众视野,其中自动驾驶技术更是激发了人们对未来出行方式的无限遐想。从理想中的全自动驾驶车辆,到市场上已可购买的NOA、NGP、Autopilot等辅助驾驶系统,乃至基础的自适应巡航控制(ACC)系统,它们的核心均在于模拟人类驾驶行为,通过对外界环境的感知与分析,做出驾驶决策。

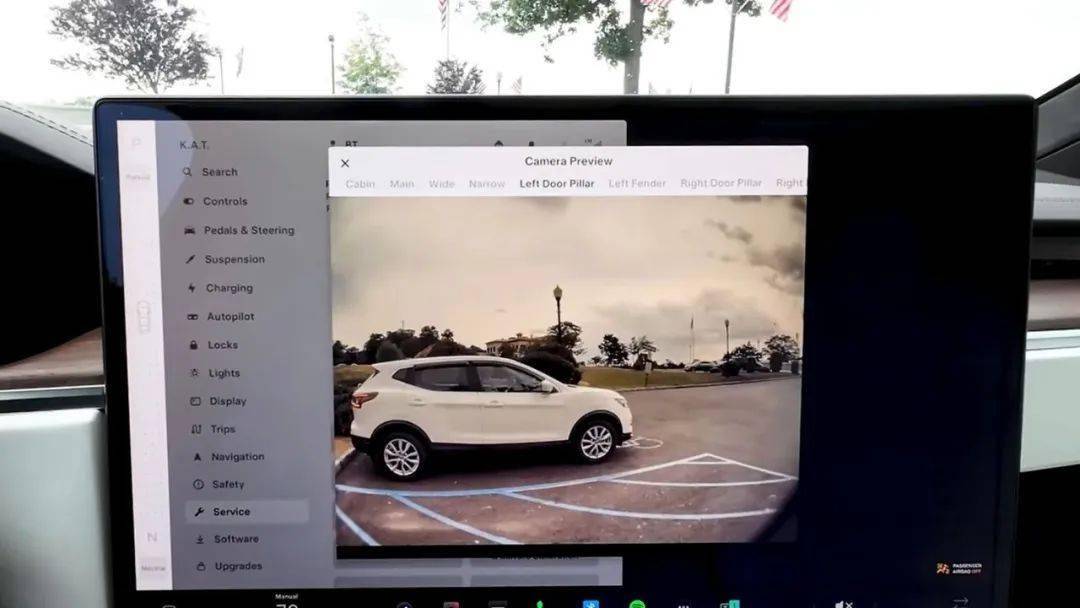
正如人类驾驶员依赖视觉信息驾驶,视觉感知在智能驾驶辅助系统中同样扮演着至关重要的角色。通过车载摄像头、传感器等设备收集周围环境数据,结合计算机视觉与AI算法,车辆能够“洞察”路况、识别障碍物乃至预判行人动向,显著提升驾驶的安全性和效率。这一过程中,深度学习技术被广泛应用于图像特征提取与分类。
然而,视觉感知面临的一大挑战在于处理“长尾场景”——即那些虽然概率低但风险高的突发情况,如恶劣天气或临时道路施工。传统深度学习模型因缺乏足够的数据训练,往往难以应对这些场景。雨雾天气或强烈光线会降低摄像头成像质量,因此通常需要结合毫米波雷达或红外传感器来提高系统的冗余性和可靠性。尽管有人如Elon Musk坚信仅凭视觉感知即可实现全面自动驾驶,但多数解决方案仍倾向于多传感器融合。

高质量的标注数据对于训练视觉感知系统至关重要,但这一过程高度依赖人工,成本高昂。同时,实时处理大量图像数据需要强大的计算能力支持,目前业界多采用轻量化模型与边缘计算相结合的方式。为解决罕见场景导致的模型失效问题,还需通过人工社会仿真和在线优化提升模型的泛化能力。

针对自适应巡航控制系统(ACC)的视觉感知性能,业界长期缺乏统一的测评标准。为此,《智能网联汽车辅助驾驶前向视觉感知性能要求及测评方法 第2部分:自适应巡航控制系统》(T/CSAE 266.2-2024)标准的出台填补了这一空白。该标准基于ACC功能的现有标准和车厂需求,明确了前向视觉感知的测评要求和方法,涵盖了直道、弯道、目标切入/切出等主流测试场景,为提升系统可靠性和安全性提供了指导。同时,该标准还促进了视觉传感器技术的研发与产业化落地。