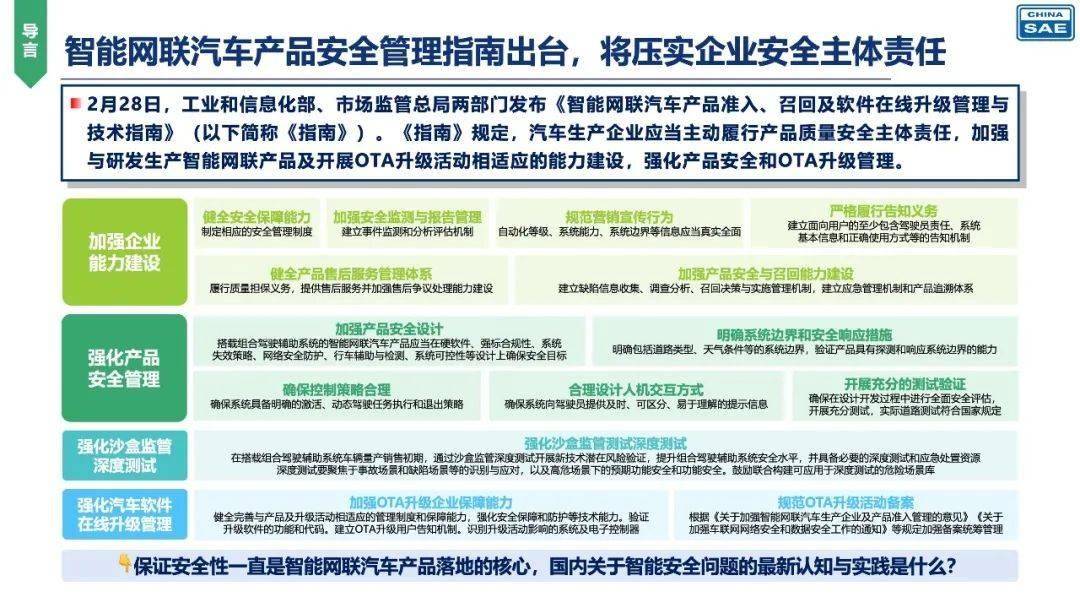
近日,智能网联汽车领域的安全管理迎来了新的里程碑,工业和信息化部与市场监管总局携手颁布了《智能网联汽车产品准入、召回及软件在线升级管理与技术指南》。此举旨在深化智能网联汽车的规范化管理,确保车辆安全性能,提升整体安全标准,为汽车产业的高质量发展注入新动力。
根据《指南》要求,汽车制造企业需积极承担起产品质量安全的主体责任,构建全面的安全管理体系。这一体系涵盖了事件监测、快速响应及网络安全防护等多个核心环节,尤其在自动驾驶系统上,明确规定了激活与退出的明确策略,以及人机交互的提示机制,同时强化了沙盒监管测试的能力。在软件在线升级(OTA)方面,企业需建立用户告知机制,并对升级影响进行全面评估,通过备案制度实现全过程的监管。
中国工程院院士、清华大学教授李骏指出,自动驾驶的安全体系由系统安全与运行安全共同构成,必须在大规模市场投放前进行严格的验证与认证,以确保车辆全生命周期的安全性。他透露,清华大学、北京航空航天大学、一汽及比亚迪等机构正在积极开发车载运行安全风险管控系统,预计在2025年将逐步应用于自动驾驶系统,为自动驾驶的安全监管与实施提供有力支持,降低事故率至可接受水平。
同济大学汽车学院教授朱西产则强调了自动驾驶域、紧急避撞域与被动安全域之间的割裂问题,认为这是当前智能驾驶安全的主要挑战。他提出的三域融合方案,旨在通过MRM(最小风险策略)实现AEB系统的二级制动策略,以及TTC(碰撞时间)预警机制,从10秒预判到0.5秒紧急响应的全周期覆盖,力求实现更加极致的智能安全。

清华大学苏州汽车研究院的陈明洁团队则关注于智能驾驶测试的挑战,指出测试需覆盖各种天气、道路组合及交通参与者的行为模式,因此测试里程与场景几乎可以视为“无限”。她认为,真实道路测试已无法满足多样化场景的快速重复测试需求,行业亟需加速测试过程,并寻求道路测试的替代方法。为此,她团队开发的整车在环实验平台,采用全新的测评工具链,用于多样化交通场景的测试,以评价机器的感知与决策能力。

清华大学车辆与运载学院的副研究员王红提出了一个贯穿开发、验证与验证(V&V)、运行阶段的智能驾驶汽车预期功能安全(SOTIF)技术体系。她指出,通过监测车辆行为的合规性,以及构建车载AI算法失效风险预测模型,可以显著提升自动驾驶的安全性。这一体系通过STPA安全分析方法生成需求,开发出了一系列策略,包括道路法规符合性在线监测、AI算法不确定性在线评估及合规安全决策方法实践。

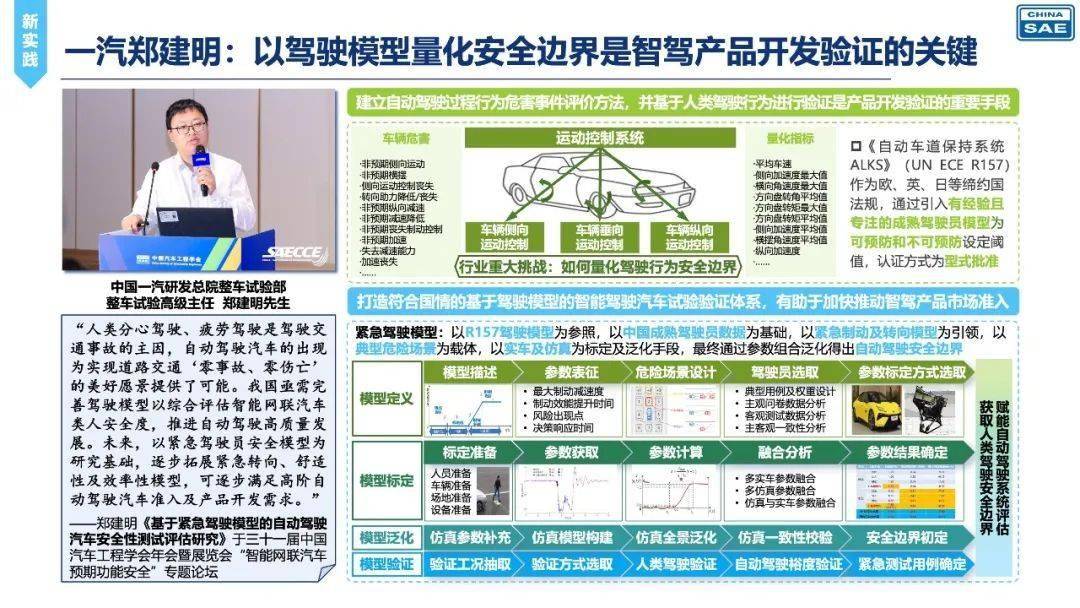
中国一汽研发总院的郑建明团队则基于《自动车道保持系统ALKS》(UN ECE R157),构建了符合中国国情的驾驶模型,为智能驾驶汽车的试验验证体系提供了安全边界确定方法。该模型以中国成熟驾驶员数据为基础,通过参数组合泛化,最终得出了自动驾驶的安全边界。他预测,未来这一模型将逐步拓展至紧急转向、舒适性及效率性模型,以满足高阶自动驾驶汽车的准入及产品开发需求。